Downloads
Download


This work is licensed under a Creative Commons Attribution 4.0 International License.
基于人工智能的药房管理机器人设计与研究
孙明,何海玲,程慧,罗嘉盈
肇庆学院经济与管理学院,广东肇庆
摘要:基于当前医院的传统药房取药排队过久、配药发药易出错等问题,本团队研发了一款人工智能的药房管理机器人,主要功能有:①自动识别分拣、包装和标记药物;②实时管理药物库存;③精准开盖取药、分药;④提供医嘱、药品咨询;⑤兼容集成现有的药房管理分支系统等功能,协助医院药房高效处理和管理海量药物、实现精准配药和发药。其中,该产品新增的开盖取药功能,弥补了当前市场上药房机器人无法精准开瓶分药的不足,减少了特殊药丸按粒配药的出错率,提升了患者满意度和药房管理效率,走在智能化药房管理领域的前沿。
1 研究背景和意义
1.1 研究背景
随着全球人口老龄化的加剧,人民群众对医疗服务的各项需求显著增加,特别是对于医疗服务中的药品服务需求量和服务质量提出了更高的要求,患者一方面希望在医院获得更高效、更准确的药品配发服务,另一方面对于药物使用的安全性以及用药过程中的专业指导等需求呈现出日益增强的趋势。与此同时,医院的药房部门通过简单的增加药剂师数量,已经完全无法满足患者的各项需求,亟需通过技术手段解决上述问题。随着科技的飞速发展,为医院在药品选配工作方面开辟了新的解决思路与途径:随着自动化技术、人工智能、物联网等技术的快速发展,为药房管理机器人的研发和应用提供了技术支撑。这些技术使得药房管理机器人能够实现智能化、自动化的药品存储、分拣、配送等功能;同时,伴随着医疗信息化系统的不断完善,为药房管理机器人与医院信息系统的无缝对接提供了可能。通过医疗信息化系统,药房管理机器人可以实时获取处方信息、药品库存信息等数据,实现精准配送和高效管理。
1.2 研究目的和研究意义
1.2.1 研究目的
通过自动化和智能化技术,针对当前医院的传统药房取药排队过久、配药发药易出错等问题,研究开发出能够实现药品的快速分拣、准确配送和库存管理、协助医护人员处理大量的处方、药品配送和咨询工作、实时跟踪药品库存情况等多功能相结合的智能药房管理机器人。
1.2.2 研究意义
从理论意义上来看,智能药房管理机器人代表了药房管理向智能化、自动化方向迈进的重大突破。通过集成先进的识别、分拣与配送技术,智能机器人不仅提升了药品管理的精确性和效率,还实现了药品全链条的追溯与监控,为药房管理模式的创新提供了理论支撑。这一变革有助于构建更加安全、高效、智能的药品管理体系,引领医药行业的技术革新与发展。
从现实意义上来看,智能药房管理机器人极大地缓解了药房的人力压力,降低了运营成本,同时减少了人为错误,保障了患者用药的安全性和准确性。它们能够24小时不间断工作,提高了药房的服务响应速度和患者满意度。此外,智能药房管理机器人还促进了医疗资源的优化配置,为医疗机构带来了显著的经济效益和社会效益,是推动医疗健康事业发展的重要力量。
1.3 研究内容
本项目研究内容包括两个方面:
(1)取药机器人系统设计,主要包括底盘系统、药品识别系统、取药机械臂等机构,目的是解决药房取药自动化、智能化等问题。
(2)药房机器人管理系统设计,主要包括机器人控制系统、调度系统等,目的是提高药房机器人的工作效率。
2 文献综述
2.1 国外药房机器人的发展现状
在西方发达国家,自动化药房技术已成熟,其核心在于融合人工智能于传统药房,旨在通过自动化出药系统[1],极大提升药品分发效率[2],有效缩短患者等待时间[3]。德国 ROWA 公司、法国 APOTEKA 公司及日本TOSHO公司等,是全球自动化药房领域的佼佼者。自动化药房设备主要划分为机械手式、储药槽式、散装式及立式回旋式四大类别,核心功能聚焦于高效出药与精准储药[4]。德国 ROWA 公司,作为自动化药房领域的领军企业,专注于设计并制造机械手式自动化药房系统。该系统以其卓越的出药准确性及显著的空间与成本节约优势而著称,然而,其制造与后期维护的成本也相对较高。法国APOTEKA公司专注于储药式自动化药房的研发,利用倾斜储药槽与重力作用原理,实现药品的高效出库。尽管此系统具备快速出库的优势,但受限于需人工干预完成药品入库过程,导致整体自动化水平受限,未能实现全链路自动化操作。日本TOSHO公司的粉剂分包机展现了卓越的调剂精度与稳定性,软件灵活性强,但不适用于大规模药品分发场景。此外,德国Hanel公司致力于回旋式自动化药房的研发,通过回旋式传动链优化空间利用与适应性,尽管仍需人工参与,其技术亦颇具特色[5]。
综上所述,机械手式自动化药房展现了更高的自动化集成度与发药效率。尽管自动化药房在国外医疗领域已广泛应用,但其主要适用于发达国家中处方量小、发药需求不密集的场景。若直接将国外自动化药房设备引入我国,面对医院高发药量及候药人群密集的现状,可能难以充分发挥其效能,难以达到预期的服务优化效果。
2.2 国内药房机器人的发展现状
相对而言,国内在自动化药房技术领域的探索起步较晚,但随着越来越多医院了解到自动化药房设备及其优势,应用自动化药房的医院数量也在逐步提升。当前阶段主要通过借鉴并改良国外成熟的自动化药房系统来推进发展。陈鹏钦等(2024)[6]的研究便是基于ROWA自动化药房系统,通过优化药物分发顺序与流程,显著提升了药房运作效率及药师工作效率。同时,魏梦琳[7]与蒋婷婷[8]针对国内三甲医院引进国外自动化药房的实践效果进行了深入分析,发现这一举措有效缩短了患者等待取药的时间,降低了发药错误率,但随之而来的是较高的维护成本。
在引进之外,国内学者亦积极投身于自动化药房的自主研发与设计之中。例如,田茂君[9]设计研发了一种机械手式自动化药房系统,虽然该系统在单次操作中仍受限于针对颗粒状中药抓取,但其设计思路为突破传统机械手药房的局限提供了新思路。然而,该系统仍需人工预先摆放药盒,因此在自适应性、柔性化及整体自动化程度上仍有提升空间。
另一方面,赵相龙(2024)[10]的出药机构设计以其高准确性为特点,为缩短出药时间提供了实践指导与理论支撑。而蒋婷婷[8]则针对出药过程中的卡阻问题,设计了类似储药斜槽式的药房系统,其核心在于独特的分离模块,有效解决了药盒出药时的阻碍难题。
鉴于国内庞大的药品发放需求以及对高效自动化处理能力和大处方量管理的迫切要求,众多科技企业纷纷投身于自动化药房的设计、研发与生产领域。这一积极态势极大地加速了国内自动化药房技术的创新与扩散,推动了该领域技术的快速进步与广泛应用。
3 智能药房机器人设计
3.1 机器人总体设计
运动底盘设计采用麦克纳姆轮,如图1所示。麦克纳姆轮采用全向移动的创新设计,通过45度角辊子与地面接触,实现全方向灵活移动。其独特结构使车体可前行、横移、斜行及旋转,适应狭窄空间作业。虽结构紧凑灵活,但转矩效率较低,成本高昂,且耐磨性不足,适用于平滑地面,复杂地形下耐用性减弱。
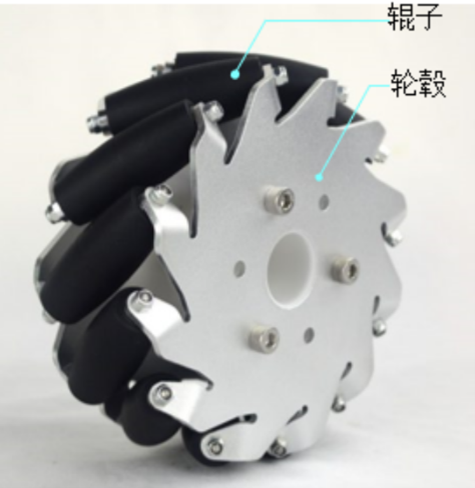
图1.麦克纳姆轮
运动底盘主控方案核心采用STM32F103ZET6作为主控MCU,如图2所示,其配置极为强大,集成了64KB SRAM、512KB FLASH等丰富资源,支持多种外设接口,包括2个DMA控制器、3个SPI、2个IIC、5个串口等,以及112个通用IO口,非常适合复杂控制需求。尤为重要的是,其外部总线(FSMC)可高效扩展SRAM及驱动LCD,显著提升显示刷新率,是STM32F1系列中的顶尖型号。

图2.STM 32主控芯片
在姿态感知方面,选用维特智能WT9011G4K陀螺仪作为位姿传感器模块,如图3所示,该模块集成了高精度陀螺仪、加速度计与地磁场传感器,运用先进算法实现动态环境下的精准姿态解算,精度高达0.01度,稳定性卓越。其内置电压稳定电路,支持3V-6V工作电压,兼容3.3V/5V系统,提供串口与IIC接口选择,满足多样化连接需求。模块还支持高速数据传输,确保实时性,是提升机器人运动精度的理想选择。

图3.维特智能WT9011G4K陀螺仪
3.2 机器人运行结构设计
本方案聚焦于机械臂的精准控制,核心在于步进电机驱动器的应用与集成。步进电机驱动器作为电脉冲至角位移的转换执行机构,通过接收脉冲信号控制步进电机以固定角度(步距角)旋转,实现机械臂各关节的精准定位与运动。控制器内含微处理器与驱动电路,解析外部指令并转换为电机信号,同时监测电机状态以适时调整。
选配的DM542与OK2D 4020A驱动器,分别驱动机械臂的五个及一个特定电机,确保高效稳定运行。DM542采用先进DSP技术,内置微细分功能,运行平稳且噪音低,具备自动参数整定与多重保护功能。
在控制策略上,引入MoveIt作为机械臂运动规划与控制的软件框架。MoveIt基于ROS,支持多种控制器与接口,提供RRT、PRM等算法实现运动规划,并通过3D仿真工具进行轨迹模拟与优化,确保实际操作的精准与高效。使用MoveIt的流程涵盖ROS/MoveIt安装配置、机械臂建模与描述、运动规划及路径优化、最终的运动控制与实时监控。
综上所述,本方案通过先进的步进电机驱动技术与MoveIt软件框架的集成应用,为机械臂的精准、高效控制提供了坚实的技术支撑。
系统框架如图4所示:
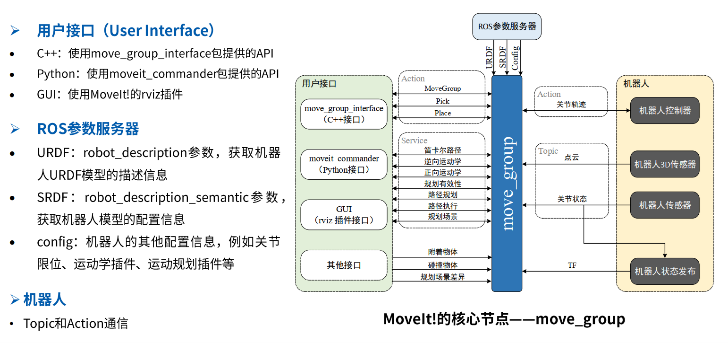
图4.MoveIt 系统框架
3.3 取药机械臂设计
3.3.1 视觉库选择
本项目通过OpenCV进行二维码扫描,OpenCV是强大的开源计算机视觉库,支持图像处理、特征检测、人脸识别及深度学习等。结合Zbar库,实现二维码的高效识别。
3.3.2 二维码扫描流程
1、预处理:包括图像类型转换、边缘检测(使用Laplacian算子)、数学形态学处理(开运算去噪),确保二维码区域清晰。
2、边界提取:通过cv2.findContours()定位二维码,计算最小包围正方形确定扫描区域。
3、识别:利用Zbar扫描器,设置参数、定义扫描范围,调用scan()方法读取二维码数据。
3.3.3 目标检测优化
1、数据集准备:采用YOLO模型,通过裁剪商品图像生成640x640像素数据集,减轻训练负担。
2、标注与增强:使用LabelImg标注,应用旋转、平移等数据增强技术提升模型泛化能力。
3、类别不平衡处理:根据类别频率设置权重,确保模型对各类别均等关注。
4、微调与压缩:基于预训练模型微调,结合模型剪枝、量化等技术,提升推理速度与效率。
5、调优与评估:通过交叉验证等策略调整超参数,优化模型性能与泛化能力,实现药品的准确识别。
3.4 机器人控制系统设计
3.4.1 主要控制器
在此采用 ESP32 进行视频的实时传输的控制处理。ESP32,由Espressif Systems开发,是一款集双核处理器、蓝牙、Wi-Fi于一体的模块,是ESP8266的升级版。它内置高效处理器、大容量内存,专为物联网设计,支持多任务操作,广泛应用于移动设备、可穿戴设备及智能家居等。ESP32支持Bluetooth 5及Bluetooth mesh,增强蓝牙功能,并拥有更多GPIO口,全速USB OTG实现便捷通信。其高性能、低功耗特性,以及丰富的开发资源和社区支持(如Arduino库、ESP-IDF框架),使其成为物联网开发的优选平台。此外,ESP32支持H.264、MJPEG等视频编码,实现高质量视频实时传输。总之,ESP32以其强大、灵活、低功耗的特点,在智能家居、远程监控等领域展现出巨大潜力。
3.4.2 整体架构
除了对视频实时传输外,再加上对环境进行安全检测,才能达到物联网设计上的监测效果。因此除了提及到的 ESP32 外,搭建物联网系统架构:感知层、应用层。感知层负责采集信息,应用层负责提供安全可靠的连接、交互与共享平台(见图5)。
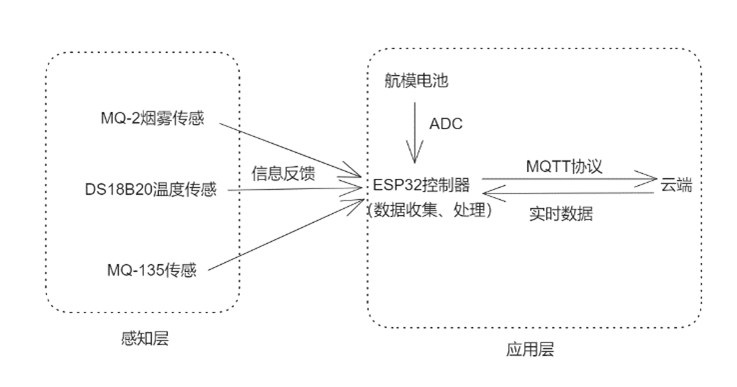
图5.物联网架构图
3.4.3 感知层概述
感知层作为物联网系统的基础,集成了多种传感器模块,如MQ-2烟雾传感器和DS18B20温度传感器。MQ-2传感器通过检测烟雾浓度变化,及时预警火灾风险,其工作原理基于二氧化锡半导体材料的电导率变化。DS18B20则是一款高精度数字温度传感器,提供稳定准确的温度读数,支持单总线通信,便于系统集成与扩展。此外,MQ-135气体传感器用于监测空气中的有害气体,如氨气、硫化氢等,其高灵敏度与广泛适用性使其成为药房环境监测的理想选择。这些传感器共同构成了物联网的感知层,为系统提供了丰富的环境数据支持。
3.4.4 MQTT通信协议
本项目采用MQTT协议作为物联网通信协议,该协议以其轻量级、高可靠性、灵活性及安全性著称,非常适合物联网设备间的数据交换。通过MQTT协议,药房环境数据及机器人状态能够实时上传至云端,同时接收控制命令,实现远程监控与管理,极大地提升了药房管理的智能化水平。
3.5 机器人调度设计
3.5.1 ROS 机器人操作系统
ROS(Robot Operating System)是一个专为机器人开发设计的开源软件框架,它模拟了操作系统的核心功能,如硬件抽象、设备控制、进程间通信及包管理等,并集成了多种机器人专用功能,如导航、视觉处理及语音识别等。ROS旨在提升机器人软件的复用性与协同作业能力,通过标准化的通信协议,实现不同程序模块间的无缝数据交换与服务共享。它支持跨语言(如C++、Python、Java)与跨平台(如Linux、Windows、Mac OS)开发,极大促进了机器人软件生态系统的繁荣。
ROS的核心架构围绕“节点”概念构建,每个节点代表一个独立的软件模块,通过消息传递机制相互通信,形成灵活的网络结构。这种松耦合的设计模式简化了系统的开发、管理与维护流程。ROS还提供了丰富的功能库与开发工具,包括仿真环境、数据可视化界面、图形用户界面以及数据记录与分析工具等,全面支持机器人的研发与测试需求。
3.5.2 ROS 数据处理器
本项目选用英伟达公司的jetson nano 01作为ROS数据处理的核心硬件平台。jetson nano 01是NVIDIA推出的一款高性能嵌入式开发板,专为AI与机器人应用打造。它搭载了基于NVIDIA Maxwell架构的GPU、四核ARM Cortex-A57处理器及高效能内存与存储系统,支持多种视频编解码格式与高速接口,能够轻松应对复杂的机器人视觉处理与数据处理任务。通过集成NVIDIA JetPack SDK,jetson nano 01不仅提供了深度学习、计算机视觉等先进技术的加速支持,还确保了软件环境的稳定与高效运行。在ROS环境下,jetson nano 01能够充分发挥其GPU加速与多版本兼容的优势,为机器人应用带来更加卓越的性能与灵活性。
3.5.3 药房管理机器人控制逻辑
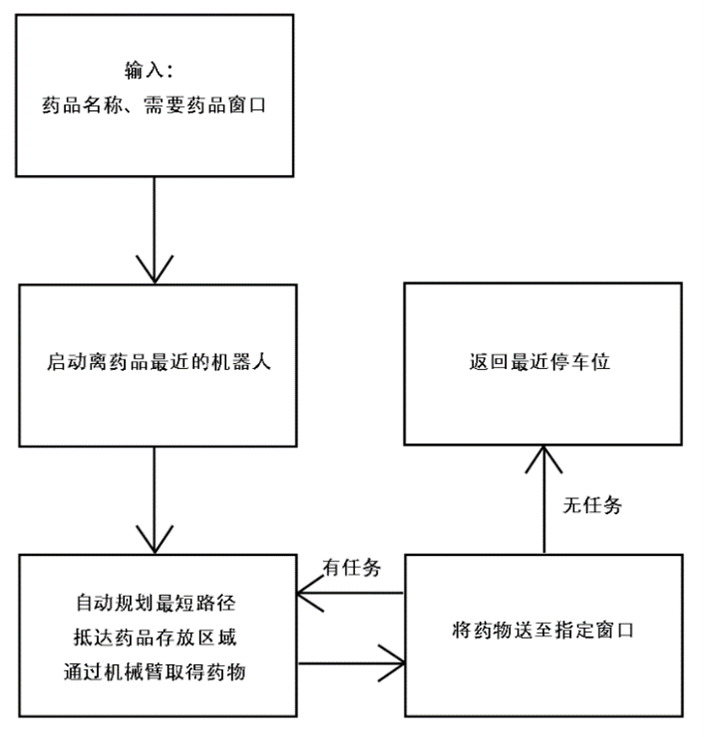
图6.药房管理机器人控制技术逻辑图
3.6 运动路线算法设计
3.6.1 Navigation 功能包集
ROS中的Navigation功能包集是专为机器人运动控制设计的一套高级导航框架,它集成了路径规划、定位、地图处理及控制模块,实现了从起点到终点的自主导航功能。该框架允许用户灵活选择全局路径规划器(global_planner)和局部路径规划器(local_planner),以适应不同的导航需求和环境。
3.6.2 Move Base 导航功能包
作为Navigation功能包集的核心,move base节点负责接收来自里程计、机器人姿态、地图等多源信息,执行全局路径规划和局部路径规划。全局规划器(如使用A*算法)负责规划从起点到终点的最优路径,而局部规划器(如使用DWA算法)则负责在导航过程中根据实时环境信息调整路径,实现避障功能。通过不断融合传感器数据和机器人当前状态,move_base能够生成并输出平滑的速度指令,以控制机器人安全、准确地到达目的地。
全局路径规划器使用A算法,该算法是一种高效的启发式搜索方法,能够在二维地图中快速找到从起点到终点的最短路径。A算法通过评估函数F(n)来估计路径的代价,其中G(n)表示从起点到当前节点的实际代价,H(n)表示从当前节点到终点的估计代价(启发式信息)。通过不断选择代价最小的节点进行扩展,A*算法能够逐步逼近并找到最优路径。
局部路径规划器采用DWA(动态窗口算法),该算法是一种基于预测控制理论的实时避障方法。DWA算法在机器人的速度空间内采样,预测每个采样速度下机器人未来一段时间内的运动轨迹,并通过评价函数对这些轨迹进行评估,最终选择出最优轨迹对应的速度作为机器人的控制指令。DWA算法具有计算量小、反应迅速、可操作性强等优点,能够在未知或动态环境中有效避开障碍物。
综上所述,Navigation功能包集通过集成全局路径规划和局部路径规划功能,为机器人提供了强大的自主导航能力。结合move_base节点的灵活配置和高效执行,机器人能够在复杂环境中实现安全、准确的导航任务。
3.6.3 AMCL (Adaptive Monte Carlo Localization) 自适应蒙特卡洛定位
AMCL是一种针对机器人在二维空间内移动的概率定位技术,通过粒子滤波算法在已知地图上跟踪机器人的位姿。AMCL利用KLD方法动态调整粒子数量,提高定位的自适应性。该方法首先均匀散布粒子于地图空间,随后根据机器人运动更新粒子位置,并通过比较模拟传感器信息与实测传感器信息(如激光数据)为每个粒子赋予概率权重。通过迭代重采样高概率粒子,粒子群逐渐收敛至机器人真实位置,从而实现精确定位。
3.6.4 路径规划模块
本模块采用RPLIDAR A1激光雷达,如图7所示,该雷达以其高精度、稳定性及易处理的点云数据在机器人路径规划与导航中表现优异。激光雷达通过三角测距或TOF技术获取环境信息,形成点云数据,为机器人提供直观的几何信息。在软件层面,ROS驱动程序用于从激光雷达获取扫描数据,并经过滤波等处理后,传递给上层算法进行建图、避障及导航计算。结合轮式里程计、IMU、视觉等多传感器融合技术,可进一步提升机器人的环境感知与导航能力。

图7.RPLIDAR A1 激光雷达
系统还采用了Astra Pro深度相机,该硬件采用结构光技术,通过发射与接收激光图案计算物体深度信息,实现三维空间重建。Astra Pro的高分辨率RGBD图像输出使其广泛应用于智能安防、机器人视觉、VR及自动驾驶等领域,为机器人提供更加丰富的环境感知能力(见图8)。

图8.Astra Pro 深度相机
4 结论与展望
4.1 结论
本研究开发的药房管理机器人具有以下优势
(1) 方便部署:由于机器人开发了仿生机械手,可以模仿人手直接在现有医院药品架上抓取药品,效率高且可以实现无菌操作,因此机器人的使用不需要对原有药房布局和结构进行较大的改造,大大减少了药房升级改造的部署难度。
(2) 成本低廉:药房机器人即可以独立运行,也可以多台机器人协作运行。特别是对于中小医院的药房智能化、自动化升级工作,可以采取分批部署的方式,减少一次性的投入成本。
(3) 高效可靠:单台药房机器人的工作效率可以顶替2-4名药剂师,大大提高了药房管理的效率。此外,药房管理机器人可以有效减少医疗人员在医疗管理上的投入,让更多的医疗人员专注于患者之间的沟通与交流,提高用药咨询服务水平。
4.2 未来展望
2024年3月1日。国务院印发《推动大规模设备更新和消费品以旧换新行动方案》,明确提出要“加强优质高效医疗卫生服务体系建设,推进医疗卫生机构装备和信息化设施迭代升级。”此外,国家卫生健康委、国家中医药管理局早在2018年颁布的《关于加快药学服务高质量发展的意见》也指出要“探索推进医院‘智慧药房’,充分利用信息化手段,实现处方系统与药房配药系统无缝对接,缩短患者取药等候时间。”这为药房管理机器人的使用提供了政策支持。
目前,国内的药房自动化设备化市场处于快速发展阶段,相关产品的成熟度和市场占有率与医疗市场不断增长的需求相比存在较大差距,也为药房管理机器人的使用提供了持续增长的市场需求。
综上所述,基于人工智能的药房管理机器人将为提升医院药品服务水平,为医疗产业提质增效做出较大的贡献。
参考文献
[2] Svirsko A C, Norman B A, Hostetler S, et al. Optimizing the Medication Distribution Process for Inpatient Units[J]. Journal of Medical Systems, 2022, 46(6):1-10.
[3] Deng J, Li TH, Zhu H, et al. Various arginine configurations modified chitosan hydrogels promote skin wound repair[J]. Chin J Tissue Eng Res, 2024, 28(10):1497-1504.
[4] 陈琛. 基于双目视觉的自动化药房智能化上药系统研究[D]. 浙江科技大学, 2023-12-25.
[5] 武文轩, 刘同欣. 药房分拣机器人搬运系统的设计与分析[J]. 精密制造与自动化, 2020(2): 5-11.
[6] 陈鹏钦, 舒幼娜, 吕奕菁, 等.基于PDCA循环法构建无人值守智慧手术药房的管理模式[J]. 中国医院药学杂志, 2024, 44(7): 847-852.
[7] 魏梦琳, 豆大海, 张登力, 王永庆. 门诊药房大规模使用自动发药机的效果与问题分析[J].现代医院, 2019, 19(04): 518-521.
[8] 蒋婷婷, 鲜秋婉, 李晨. 医院门诊药房自动化发药系统应用效果分析[J]. 中国药业, 2023, 32(4):15-18.
[9] 田茂君. 面向颗粒状中药的自动化药房关键技术研究[D]. 北京邮电大学, 2023-5-31.
[10] 赵相龙. 药房中药材按方定量出药系统设计与研究[D]. 北部湾大学, 2024-6-1.